This project involves creating an Arduino-compatible library for the MPU-9255 IMU sensor, focusing on enabling data readout from the accelerometer, gyroscope, and magnetometer. It also simplifies access to digital motion processing (DMP) functionalities that handle sensor fusion and orientation calculation.
Key Features of the Library:
- Configuration of Accelerometer, Gyroscope, and Magnetometer: Set up and adjust sensor sensitivity, sample rate, and other settings for precise measurements.
- Data Readout Functions: Simplified functions for reading raw or calibrated data from each sensor.
- Digital Motion Processing (DMP): Allows the IMU to perform complex calculations, providing filtered, stable orientation data.
- I²C Communication: Supports I²C protocol for simple, two-wire connections between the Arduino and MPU-9255.
How the MPU-9255 IMU Works
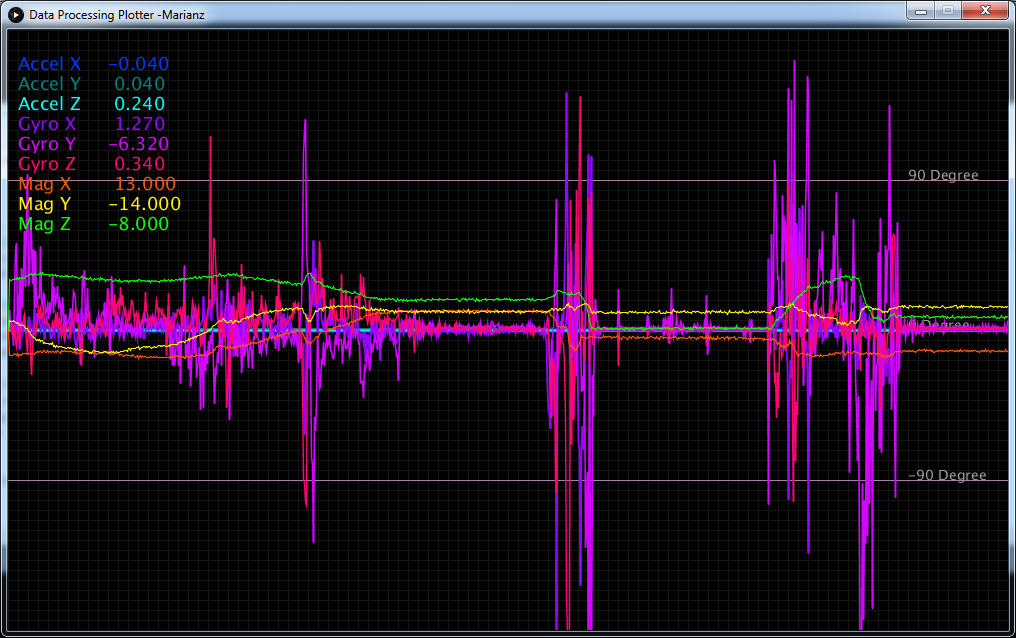
The MPU-9255 sensor integrates three sensors:
- Accelerometer: Measures linear acceleration across X, Y, and Z axes.
- Gyroscope: Detects rotational velocity in degrees per second.
- Magnetometer: Measures magnetic field strength to determine direction.
The Digital Motion Processing (DMP) unit onboard the MPU-9255 fuses data from all three sensors to provide accurate orientation information, reducing noise and drift that often affect raw sensor data. This is particularly useful for applications requiring precise navigation or balance control.
Setting Up the Hardware
1. Components Needed
- MPU-9255 IMU Sensor Module
- Arduino Board (compatible with libraries written in C/C++)
- I²C Wiring
2. Circuit Connection
The MPU-9255 communicates with the Arduino over I²C, which requires only two wires in addition to power and ground:
| MPU-9255 Pin | Arduino Pin | Description |
|---|---|---|
| VCC | 3.3V | Power |
| GND | GND | Ground |
| SCL | A5 or SCL | I²C Clock Line |
| SDA | A4 or SDA | I²C Data Line |
Note: Ensure that your MPU-9255 operates at 3.3V, as some modules are not tolerant of 5V on the data lines.
Challenges and Considerations
- I²C Communication Limitations: The I²C protocol has a limited data rate, which may lead to delays in high-speed applications. You can reduce the sample rate to mitigate this issue if needed.
- Power Supply: Ensure that your MPU-9255 sensor is powered correctly. Operating at the wrong voltage (e.g., 5V instead of 3.3V) can damage the sensor.
- Magnetometer Calibration: The magnetometer requires calibration for accurate directional readings, as it is sensitive to environmental magnetic interference.
Example source code
/* Example 1 : This example initializes the sensors and outputs raw data from Gyroscope, Accelerometer and Magnetometer. */ #include <Wire.h>// include Wire library #include <Tarsier_MPU9255.h>// include MPU9255 library Tarsier_MPU9255 mpu; void setup() { Wire.begin(); //initialize I2C interface Serial.begin(115200); // initialize Serial port mpu.init(); // Initialize MPU9255 chip } void loop() { mpu.readAccel(); // read data from accelerometer mpu.readGyro(); // get data from gyroscope mpu.readMag(); // get data from the magnetometer // print all data in serial monitor Serial.print("AX: "); Serial.print(mpu._AX); Serial.print("\t"); Serial.print("AY: "); Serial.print(mpu._AY); Serial.print("\t"); Serial.print("AZ: "); Serial.print(mpu._AZ); Serial.print("\t"); Serial.print("GX: "); Serial.print(mpu._GX); Serial.print("\t"); Serial.print("GY: "); Serial.print(mpu._GY); Serial.print("\t"); Serial.print("GZ: "); Serial.print(mpu._GZ); Serial.print("\t"); Serial.print("MX: "); Serial.print(mpu._MX); Serial.print("\t"); Serial.print("MY: "); Serial.print(mpu._MY); Serial.print("\t"); Serial.print(" MZ: "); Serial.println(mpu._MZ); delay(100); }
Conclusion
The custom MPU-9255 Arduino library streamlines the process of working with this 9-axis IMU sensor, allowing for straightforward integration with Arduino projects. This library enables reading from the accelerometer, gyroscope, and magnetometer, and uses the DMP for sensor fusion, providing robust, stable orientation data. This project is well-suited for applications in robotics, drones, motion-tracking devices, and any system that needs to track movement and orientation with high accuracy.
GitHub Repository
For access to the library code, setup instructions, and examples, visit the GitHub repository:
 View on GitHub
View on GitHub
Explore the code and contribute to the project if you have any improvements to share!